My name is Jerry Normandin. This site is to share information regarding r/c aircraft, gps guided drones, electronic home brew projects, and all things Jeep. The banner on this page is a photo taken of my HK Cloudsurfer flying over my club’s airfield in S. Dartmouth, MA.
This Website is hosted on a Raspberry PI 3+. Several years ago my site was hosted on an IBM p720. The RPi uses much less power. The little server will eventually scale out to 4 RPI RPI4 nodes and will use much less power than my p720. The cluster will exist mostly for experimentation with Kubernetes, Python and PHP development. I may also put two of my SDR modules online.
Scroll up/down on the right side of the graphic above to view the weather statistics, video cams, and time lapse video
A few of us at BCRCC got together and funded the build of a weather station. Scott built the flagpole style mast, Carlos, John B., Jeff C., and myself built up the weather station. I went with Ambient Weather hardware because they had an API that I can use. The API also allows me to pull data into my own database. At my home I have a MQTT Ticker using the Pimoroni Galactic Unicorn Display and code running on my webserver that presents the weather data to our club members without the need to using the Ambient Weather App on their smartphone. I wrote a Python script that pulls the latest weather metrics from my MySQL database and transmits a MQTT message through Mosquito running on my RPI 3 web server. The RPI 3 host also generates time lapse videos of our flying field and the trail to our field and north side of our parking area.
Video of the 2021 event shot from my GoPro Baseball Cap Cam
The Bristol County Radio Control Club enjoyed a day of fun for model plane enthusiasts in memory of their late member John Nicolaci at Mary’s Pond on Saturday, Aug. 21.
John first acquired use of the pond for himself and other club members 19 years ago, but passed away in 2009. Since then, club members have gathered together for a recreational “float and fly” each year to pay homage to Nicolaci.
John had many model planes over the years, but was perhaps best known for his use of the PBM Mariner. The plane was much bigger than most models, with a wingspan of 14 feet. Family members recalled the time he flew it all the way to Martha’s Vineyard.
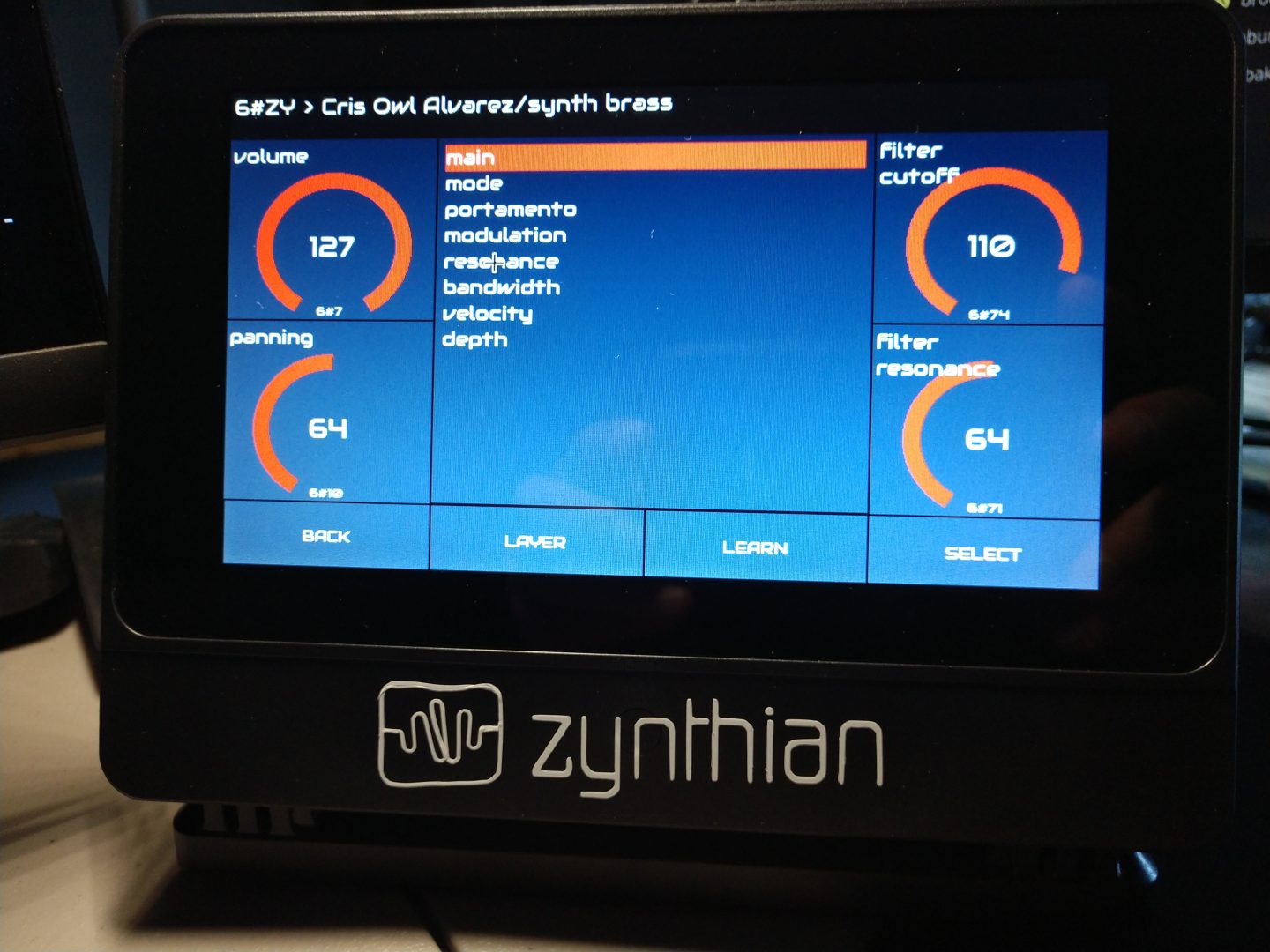
Zynthian is an opensource project. To get information on how to buy the official kit or build a DIY version like I did visit https://zynthian.org/ for more information. Zynthian is more than just a layer driven synthesizer that supports many sampled synthesizer engines. It also features support for the setBfree Organ emulator (sounds incredible) SFIZZ I have full control with my EWI and more . Check it out. Here are just a few songs I recorded with the Zynthian
Starting the play blues progressions and getting a bit more comfortable with the EWI. I’m playing the Baritone Sax line here on the EWI and also recorded the Tenor Sax Blues improvisation on the EWI.
This is what an EWI looks like. The fingering is a cross between a saxophone, recorder, and EWI..
The AR Wing kit build is a plain old black “bat” wing, no stabilization. Just add your own receiver, battery, bind it to your transmitter and it’s ready to fly.
I had different plans for this wing.
I painted the EPO airframe with PastiDip spray. I found the Glacial White to be a pretty close match for US Navy colors, and I used Blaze Orance for the wingtips.
The graphics were made with a Silhouette Portrait 3. It is a low cost vinyl cutter that supports Linux.
This AR Wing build features a Sparky 2.0 flight controller, BN-220 GPS, 2300ma 11.1v Flight Battery, RunCam 2, and a Jumper R900 900mhz receiver with full telemetry. I modified the Sparky 2.0 firmware to support the Smartport protocol on servo connectors 5 and 6. I plan on adding a Foxer T-Rex Micro 1500TVL 6ms WDR FPV Camera, and a TBS Unify EVO VTX.
What do you think about the build ?
Here’s a video of the Maiden flight. The flight was kept short and sweet so I can check the flight logs to see if there’s any tuning required. The maiden went very well.
Maiden flight of my Legacy AR Wing. It’s painted with a US Navy color scheme
Weather information is fetched from the Bliss Corner weather station through the openweathermap.org API. The information here would only be useful for BCRCC members. If you live in the South Eastern Massachusetts region and are looking for an r/c club with a great location to fly check out our club’s website for more information
It’s been a while since I’ve posted. Since I returned to work after my Vacation it’s all been about adapting. I decided I didn’t want to work in a lab where all the air circulates through one HVAC. I worked from home as long as I could on Professional Development assignments and updating documentation. My employer was running out of work at home assignments and I was asked to return to the lab or take a leave of absence. During the month of July I started to look for an opportunity where I can work at home as a Linux Systems Engineer and after a long interview process I got an offer!
Last week I flashed an old Sparky flight controller with iNAV 2.5.1 firmware, attached a Mini uBlox GPS to it and installed it in a Zohd Nano Talon EVO 2. The manual maiden flight went well. The trims didn’t need adjusting, it flew perfectly. Last Monday I installed a RunCAM 2 4k Camera. The goal of this second flight was to test the camera, test iNAV Holding Pattern mode, and test high speed full throttle passes. Well Cell #1 in the 2200mah 3C battery failed during the second full throttle pass.
The replacement vtail stabilizer will be is expected to arrive next Wednesday. I have retired that battery. I’ve got a new 3300ma 3C battery for the next flight.
For the past two weeks I’ve been lucky enough to be on vacation. I didn’t go on a long distance road trip with the family. When you are far from home using a public restroom during the Pandemic is awkward. I don’t like wearing a mask. I do it when I need to buy fuel, supplies, or groceries. You won’t see me going to a restaurant, movie theater or event. I don’t like wearing them. I prefer open space anyway. During the past two weeks my wife and I did short road trips with our dog Allie. We had our sons over with their girls for barbecue. My middle son was stuck retooling and configuring Water Rower’s automated production equipment and showed up at the end of the day. We didn’t have a cornhole tournament like we originally planned due to the pandemic, we decided to postpone it. My dog Allie cracked me up. She was rolling in the grass and it appeared she was rolling to a tune from Snarky Puppy
I’ve been building a new powered sailplane to add to my fleet of radio control airplanes. I added Flite Test Stabilization controller and a salvaged FPV system from the 1.2m Opterra flying wing I crashed due to a failed bearing in the motor. The Opterra was actually smoking when it fell out of the sky. I wish I had video to post, the crash was epic.
My Volantex Ranger 1600 build came out pretty slick. I optimized the Aura 5 Lite controller for a larger aircraft by adjusting the elevator throws and reducing the aileron throws. I also added expo for throttle, aileron, and stabilizer. Control for the sailplane feels rock solid. I can disable stabilization to perform aerobatic maneuvers and engage 3-axis or 6-axis stabilization if the thermals are too strong or if I want to shoot video from the airplane and want a rock solid stable flight. Last Thursday my wife came with me to the BCRCC airfield and launched the airplane for me. Here’s the video:
I went to the club’s airfield several times this week. It’s always a good time when there are more members there with multiple aircraft in the air.
I rebuilt my RMRC Recruit V2 with a 2206 2300kv motor, tri-blade 5×4.5 prop, Runcam HD V2 camera for flight video and FPV, 2700ma 30C battery, Cricket VTX. My wife and I headed out to my club’s airfield last Sunday. Here’s the flight video
The weather forecast posted the winds for the South Dartmouth Padanaram area as N/NW @10mph. When I got to the airfield at 10am the windsock was just about fully inflated which means the wind is 17mph or higher. My RMRC Mini Recruit packs a lot of thrust and is heavy for a 600mm wing. Here’s the flight video
I went out to the BCRCC Airfield in South Dartmouth for a maiden flight of my Strix Nano Goblin, fly my RMRC Mini Recruit with FPV gear, and my RMRC full size Recruit carrying an old GoPro 4. It was windy with 24 mph gusts and the wind was variable. It was fun! The last time I hand launched the Mini Recruit my fingers got all cut up like hotdogs prepared for the barbecue grill. Today, instead of throwing it overhand like a baseball I am launching it by the wing, side arm style, like a a frisbee
I have a larger version of the flying wing, it’s equipped with a Sinopine FPV camera and a GoPro Hero4 for recording the flight video
Last, but not least… The maiden flight of my Strix Nano Goblin. The plan for the flight, see how fast and steep it can climb, do a barrel roll, followed by a hard bank to the field, a roll, and buzz me overhead just before landing
The Nano Goblin is small, fast, agile, and capable of long flight times with a 3200maH 2s battery. I’m test flying it with a Sinopine SD FPV camera. I plan on updating with a RunCam Split Cam Nano 3, and TBS FPV transmitter. This airplane is fun to fly. All I had to do is pull fast on the stick and she shot up on a steep climb, then hard left on the roll stick.. wow. It is fun!
If you live in South Eastern New England and are looking for a great location to fly your model aircraft check out my club. We have slots available for a few more members.